Information Model for LAE Representation
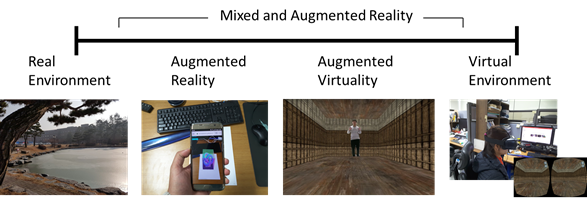
Augmented Reality Continuum
Characteristics of LAE representation in MAR world
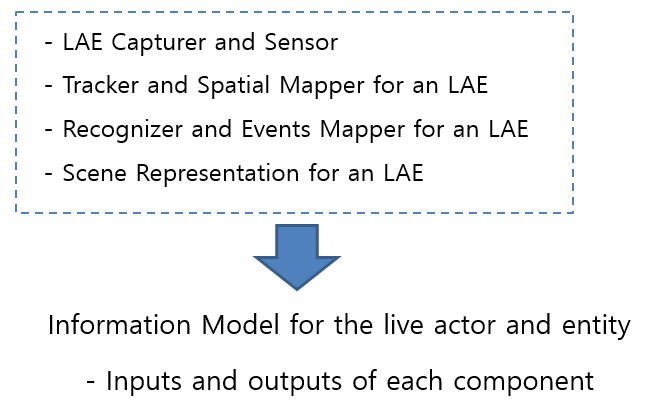
Information Model for LAE
- -use X3D file or others
- -use HTM5 / X3DOM
- -define Object Models for Live Actors and Entities
- -define Motion Volume of Live Actors and Entities in real world
- -define Motion Volume of Live Actors and Entities in virtual world
- -define Spatial Mapper
- -define Scene Description
- -define Event Mapper
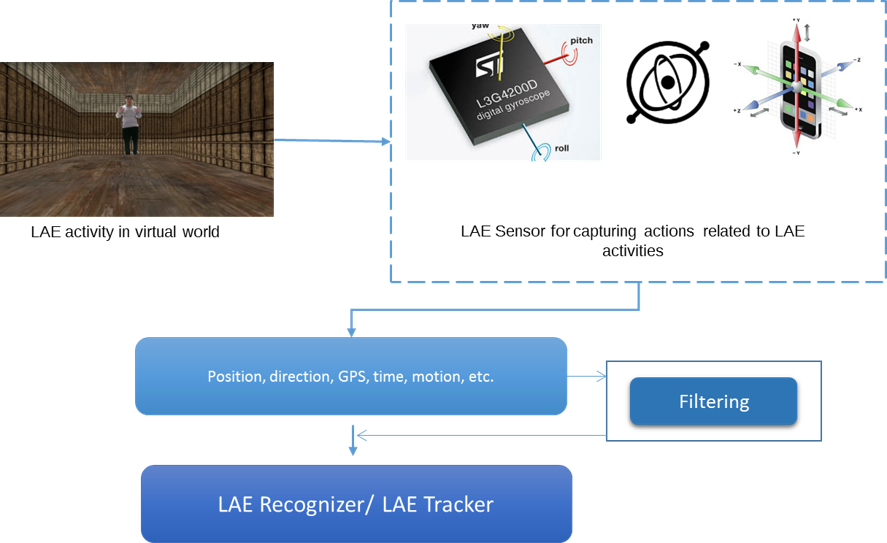
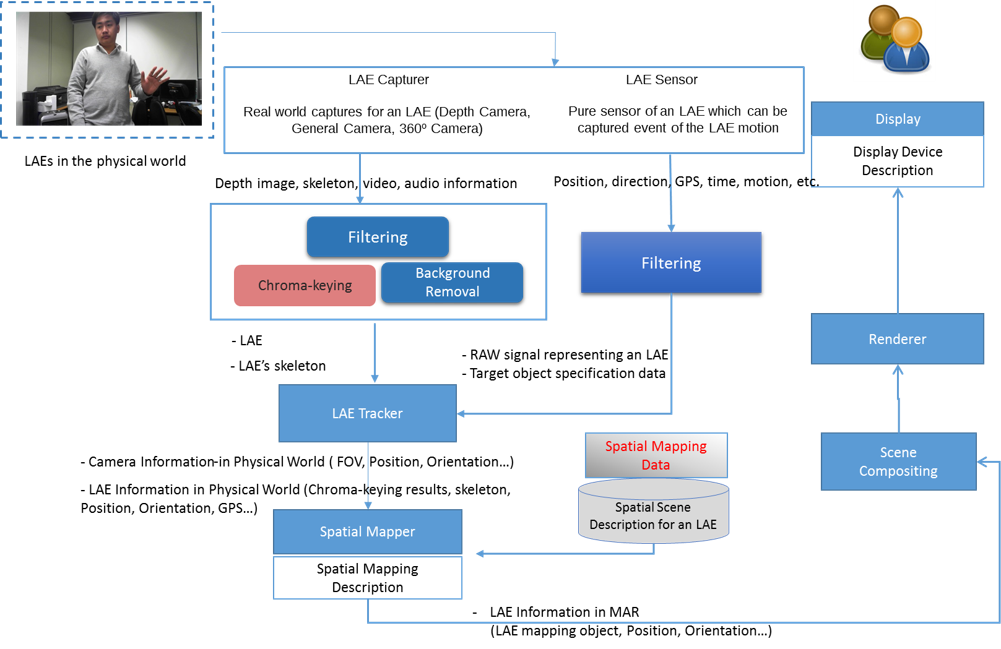
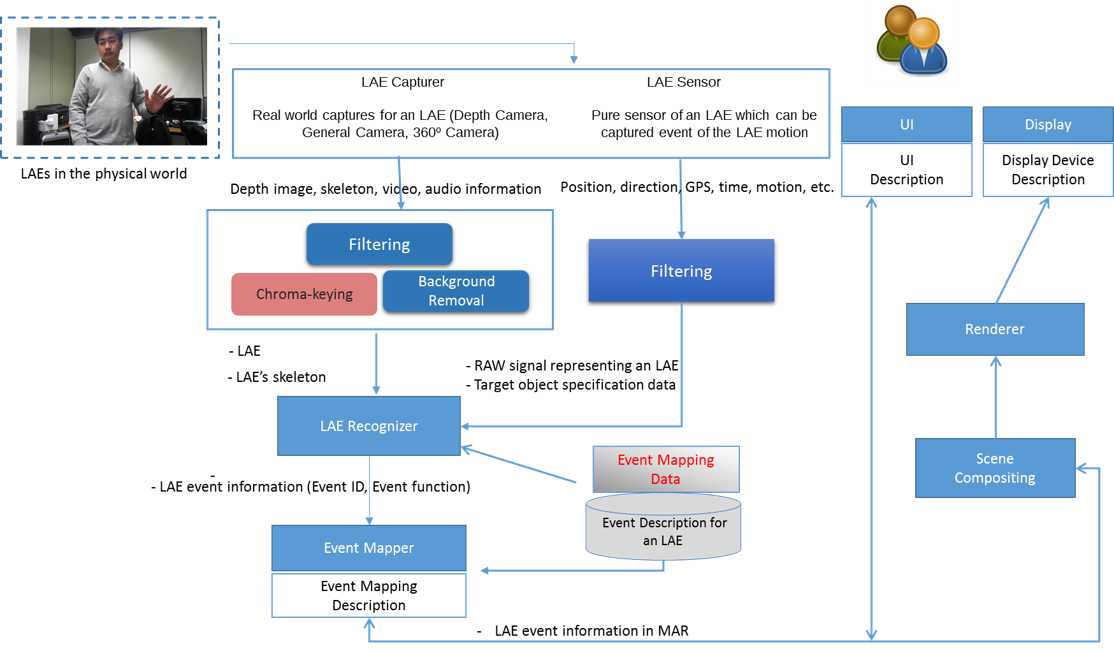
LAE Capturer and Sensor
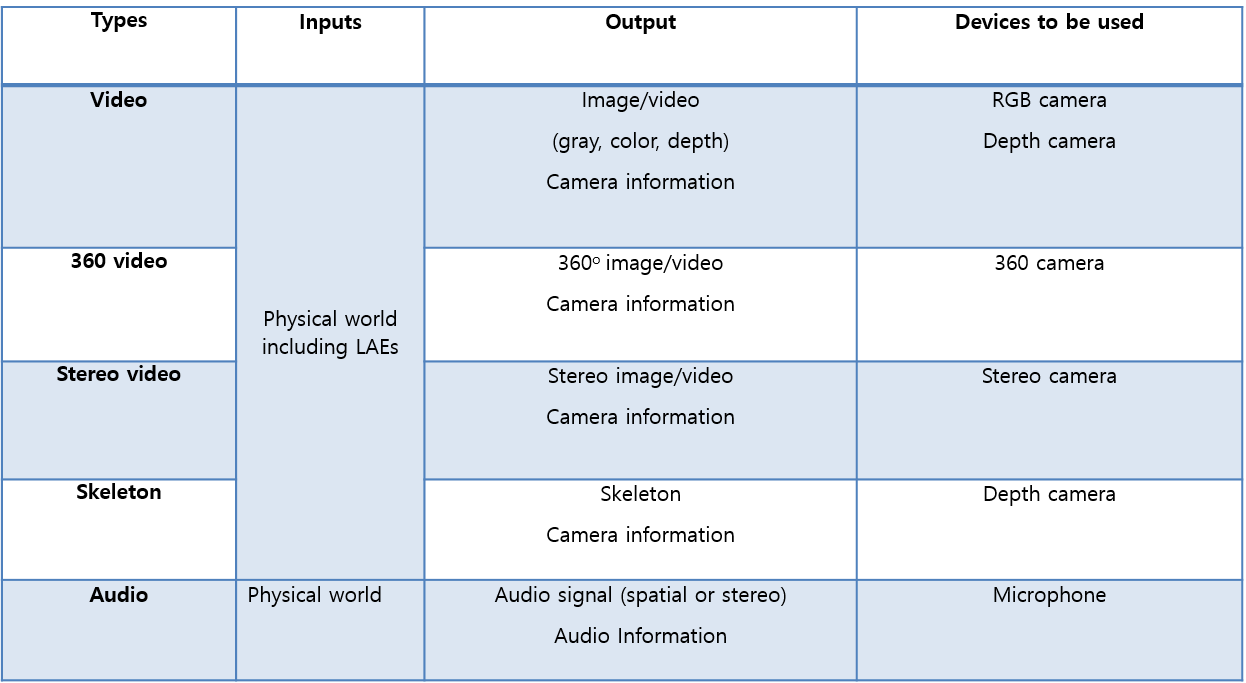
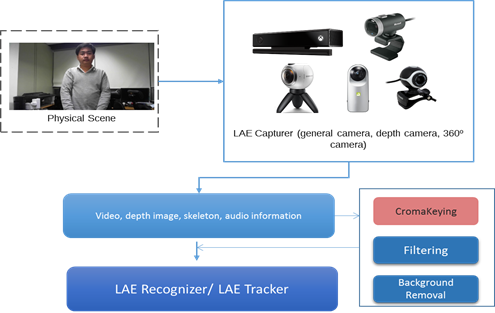
LAE Capturer
- Capturing devices used to capture an LAE in physical world.
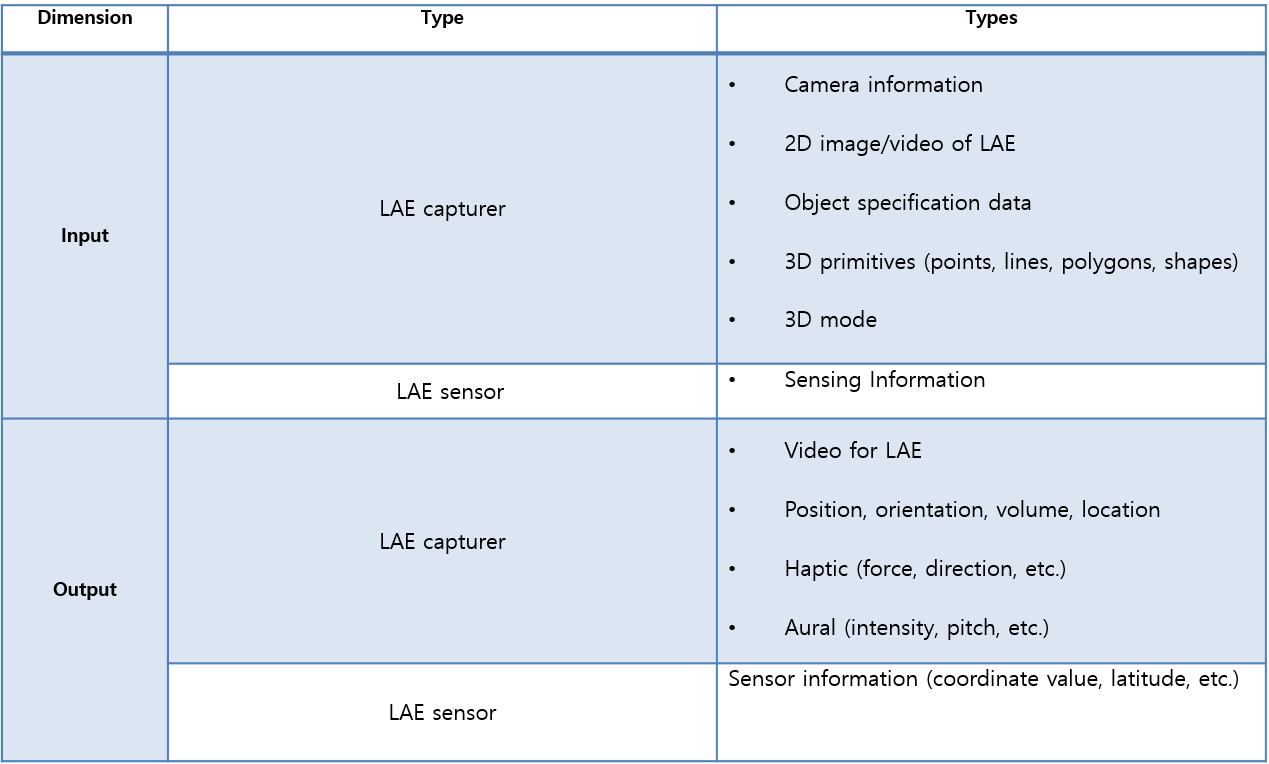
Input / Output of LAE Capturer
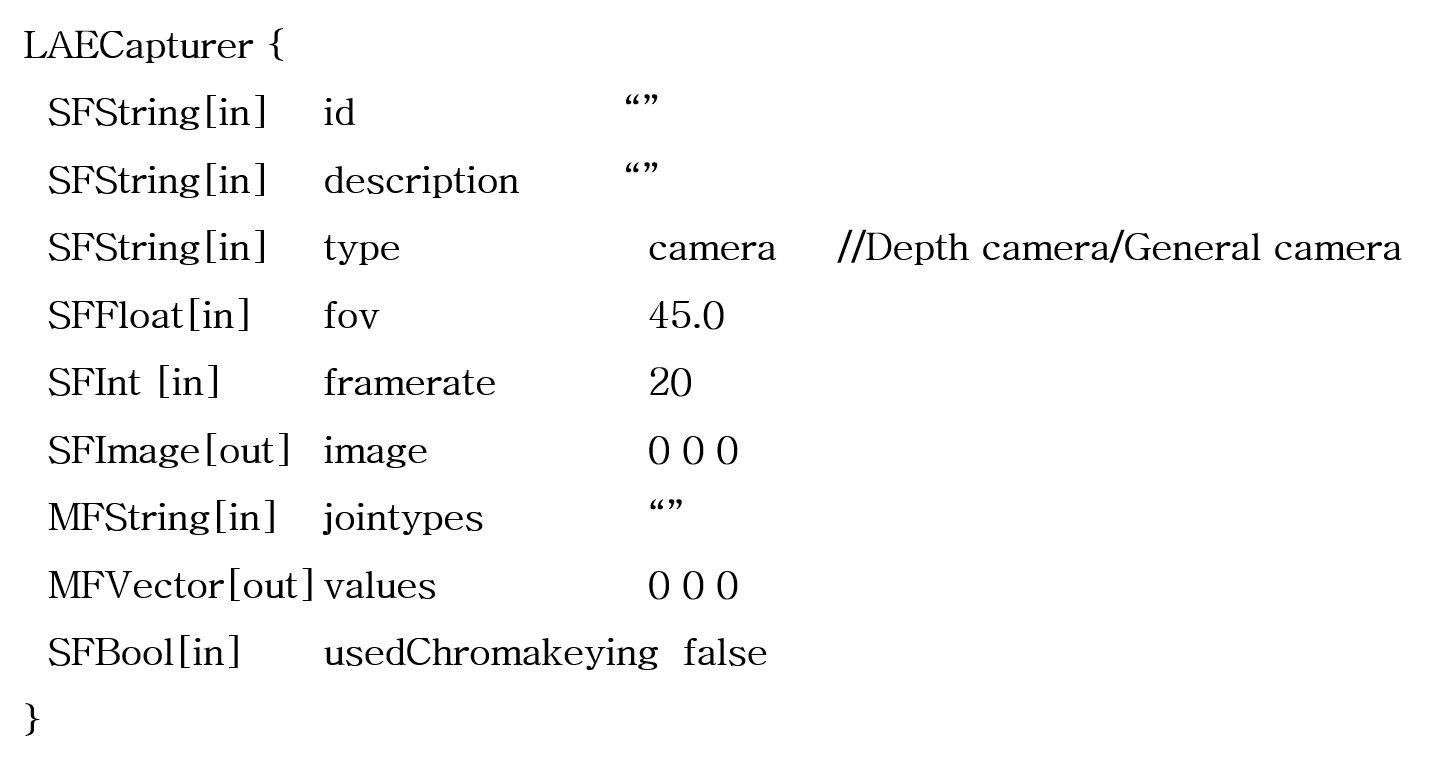
Node for LAE Capturer
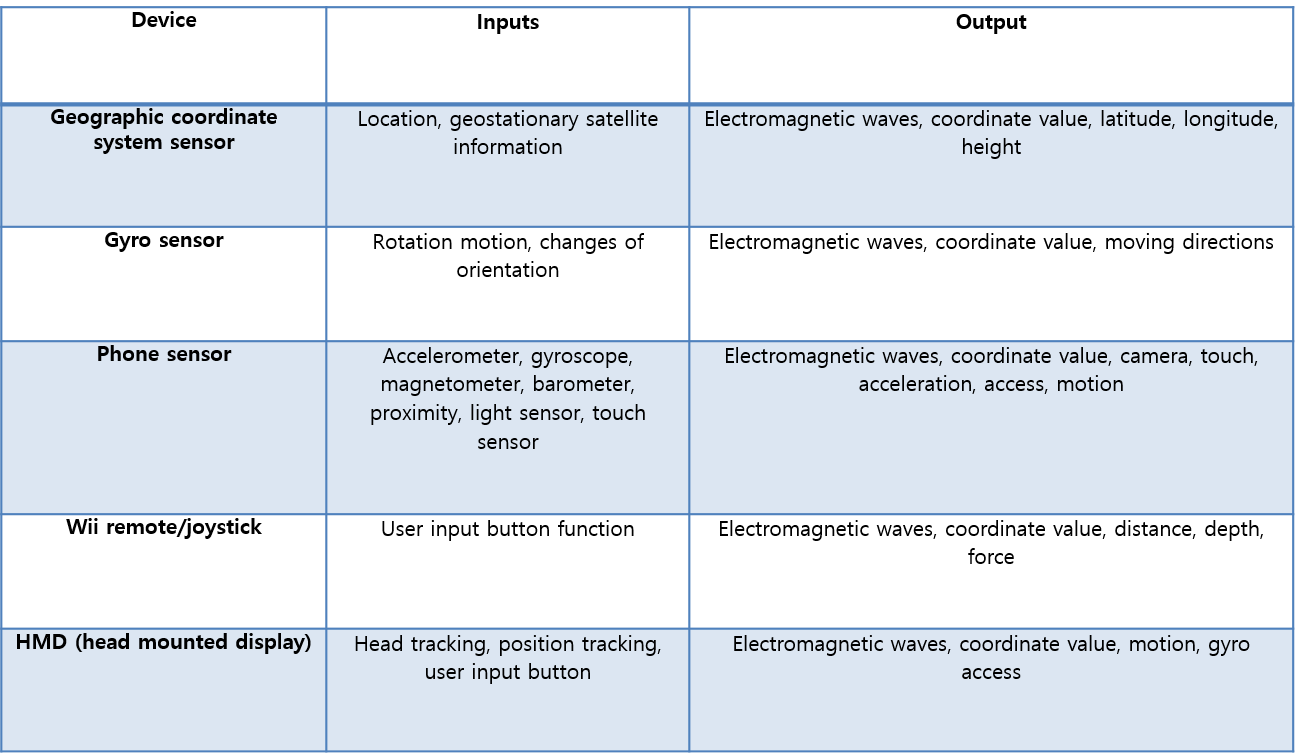
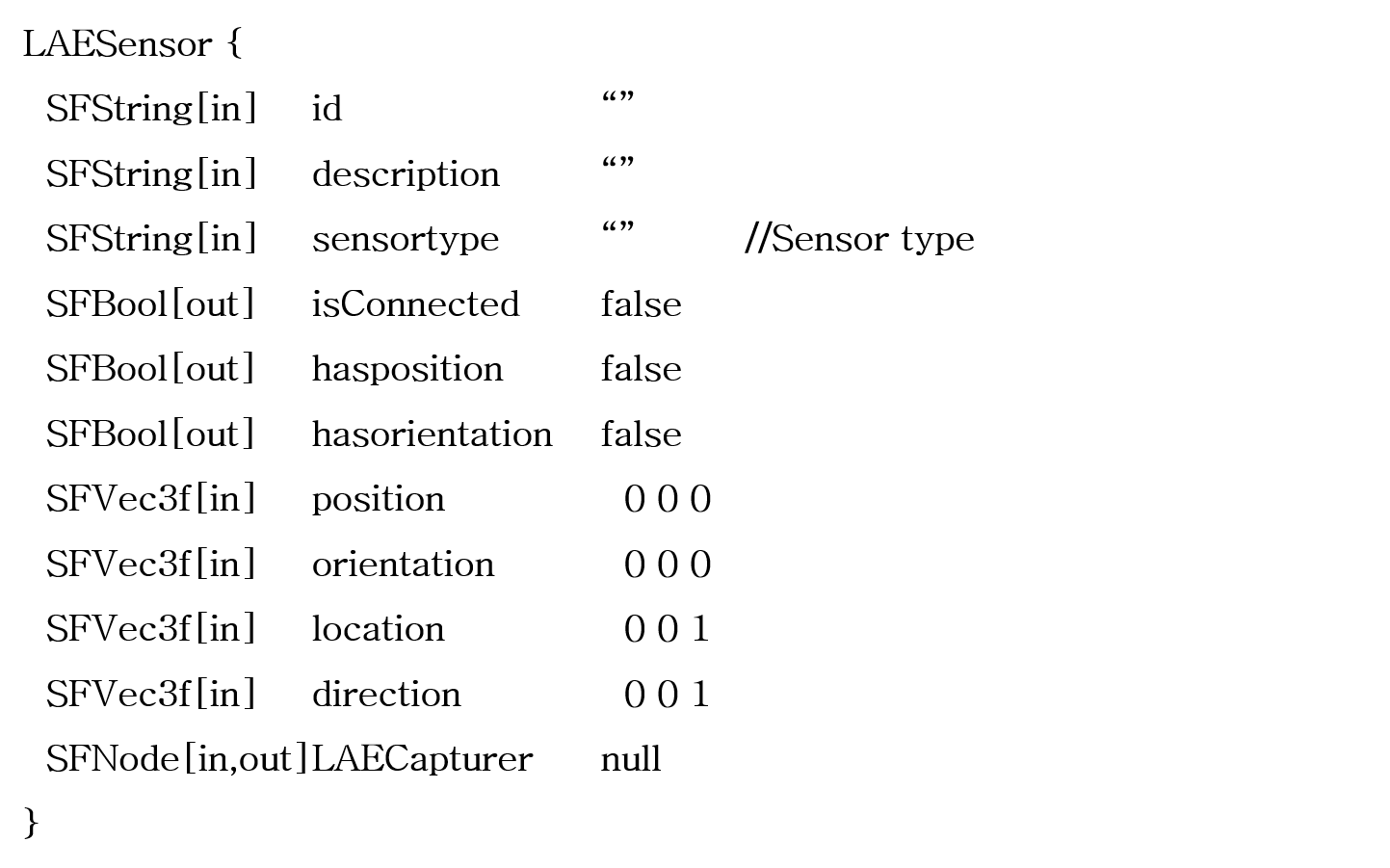
LAE Sensor
- Measure various physical properties, interpret and convert the observation into digitals signals related to LAE.
Input / Output of LAE Sensor
Node for LAE Sensor
Tracker and Spatial Mapper for an LAE
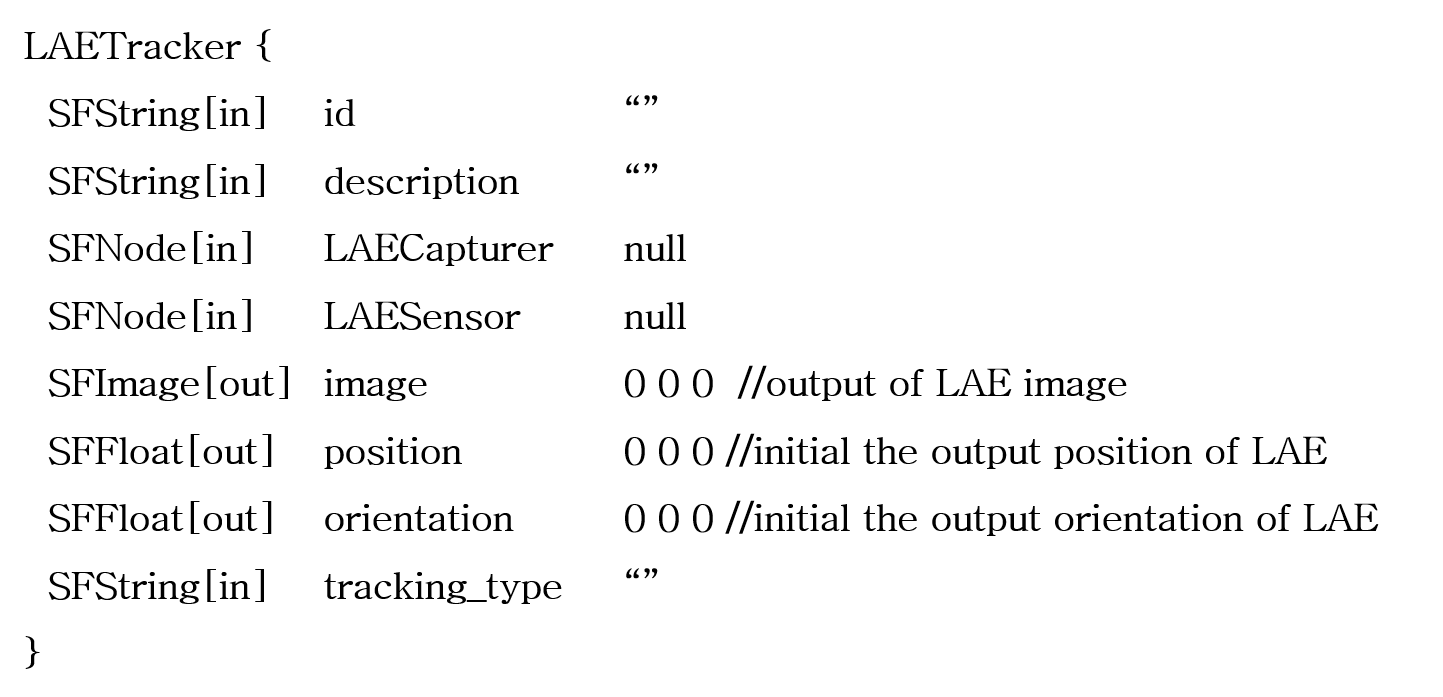
LAE Tracker
- LAE Tracker can track a variety of information that related to LAEs such as real camera information and LAEs themselves in the physical world.
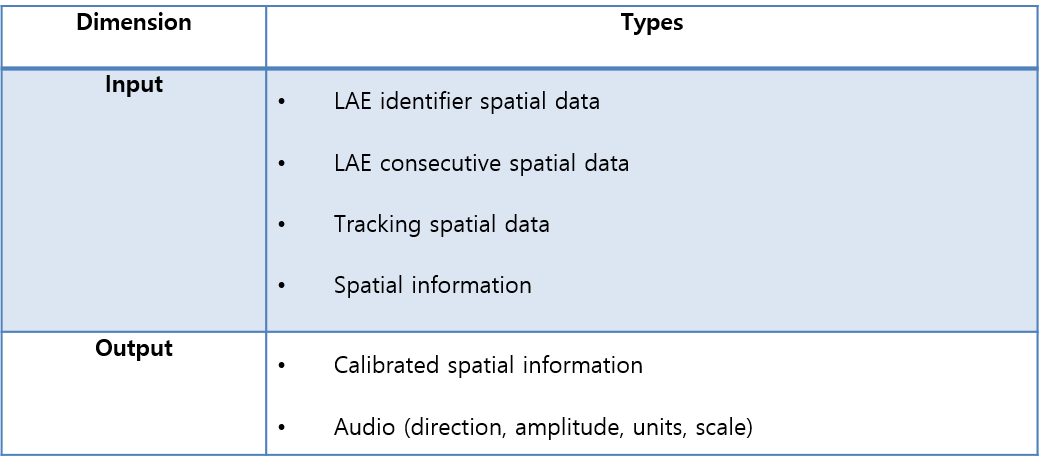
- The spatial mapper for an LAE is to provide spatial relationship information (position, orientation, scale, and unit) between the physical world and the world of the MAR scene by applying the necessary transformations for the calibration of LAEs.
Input / Output of LAE Tracker
Node for LAE Tracker
Input / Output of LAE Spatial Mapper
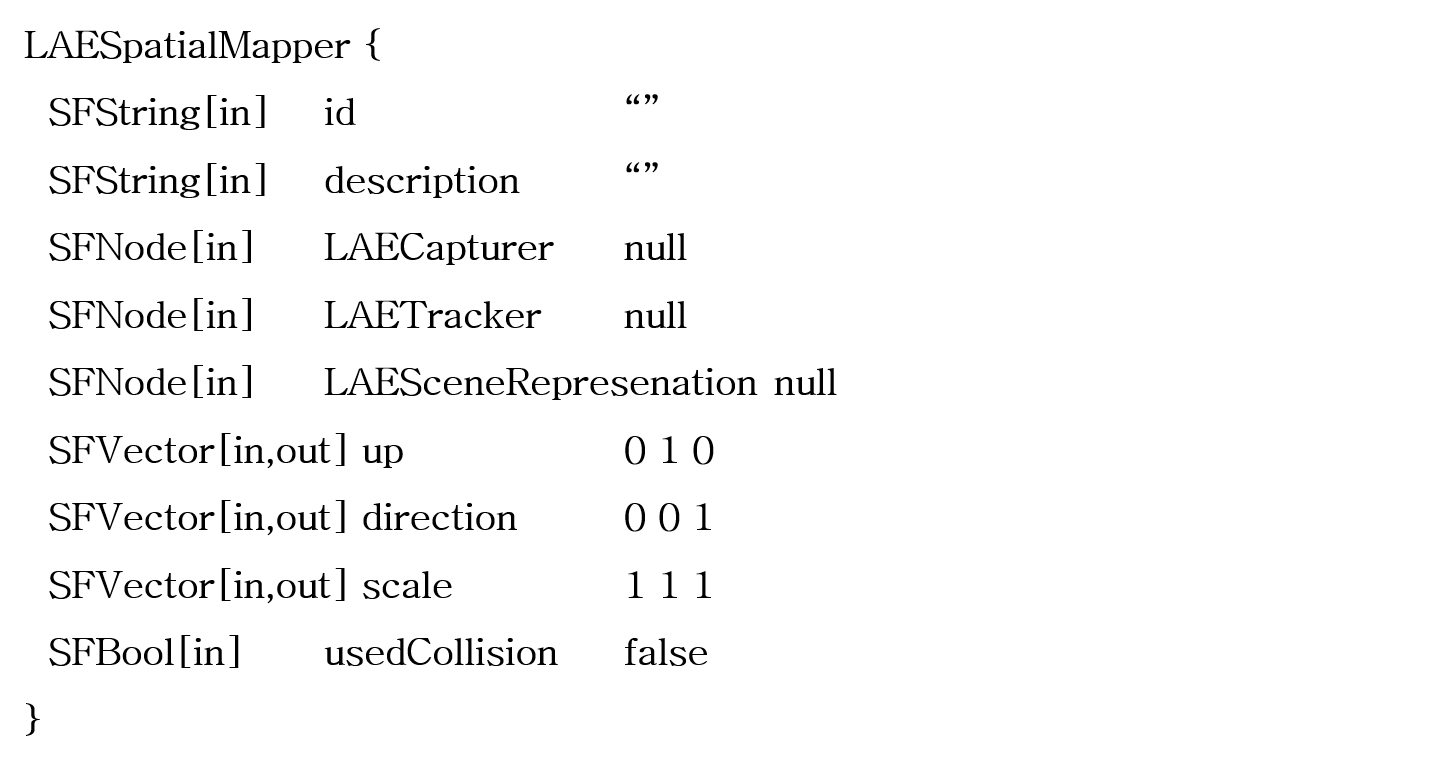
Node for LAE Spatial Mapper
Recognizer and Events Mapper for an LAE
LAE Tracker
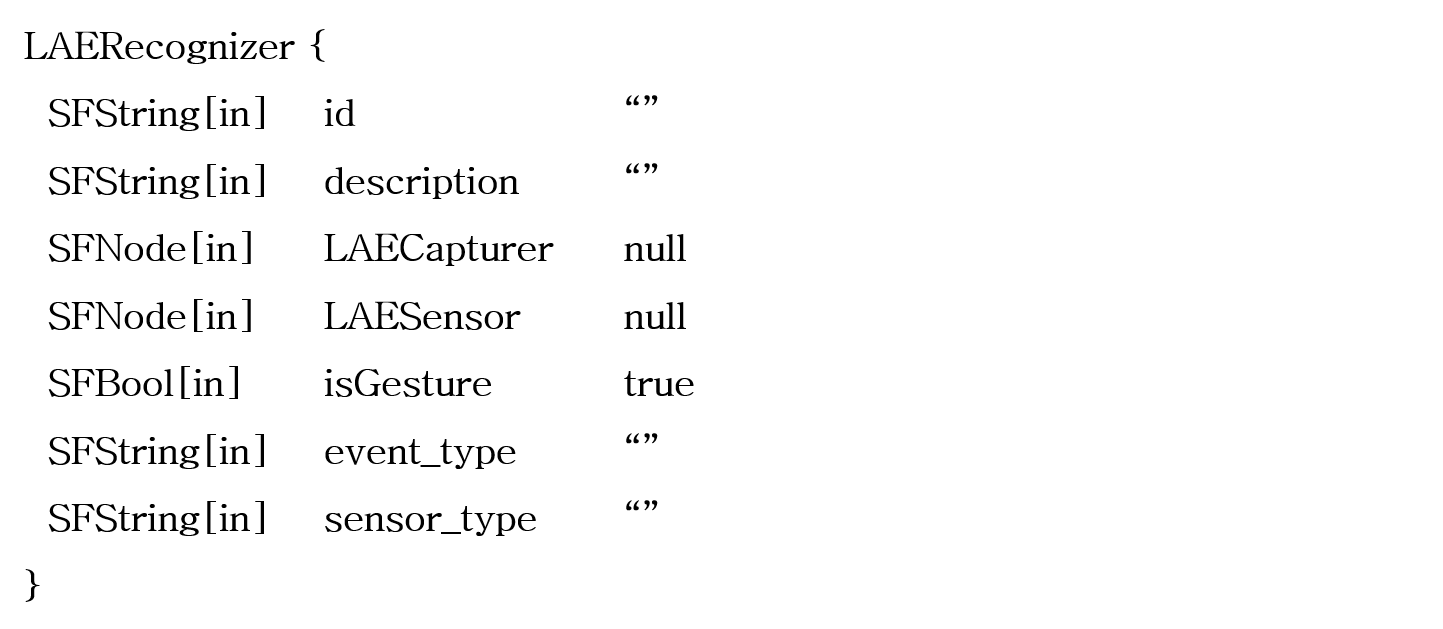
- LAE Recognizer is a component that analyzes sensing data related to the representation of an LAE in a MAR world and producesMAR events and data activated from the LAE through comparison with a local or remote target signal.
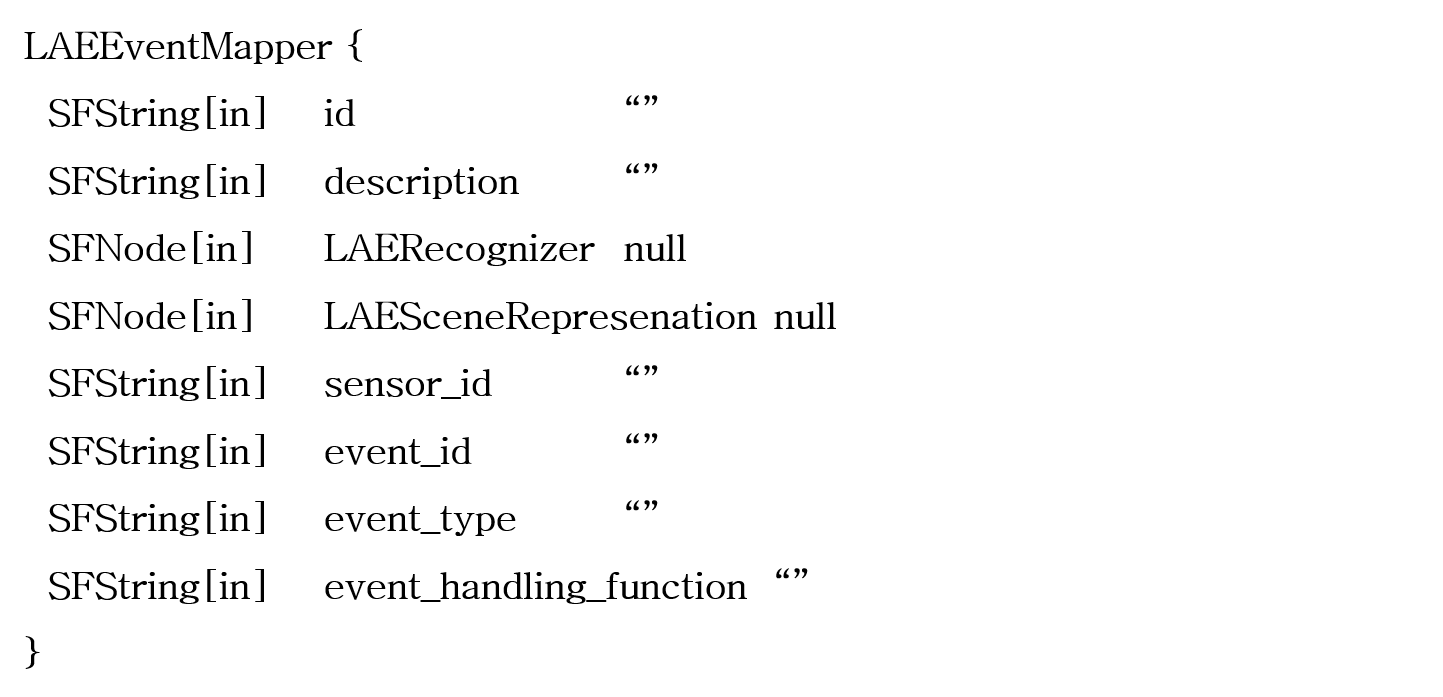
- The Event mapper creates the relationship between a MAR event of LAE that obtained from the LAE Recognizer and/or LAE Tracker.
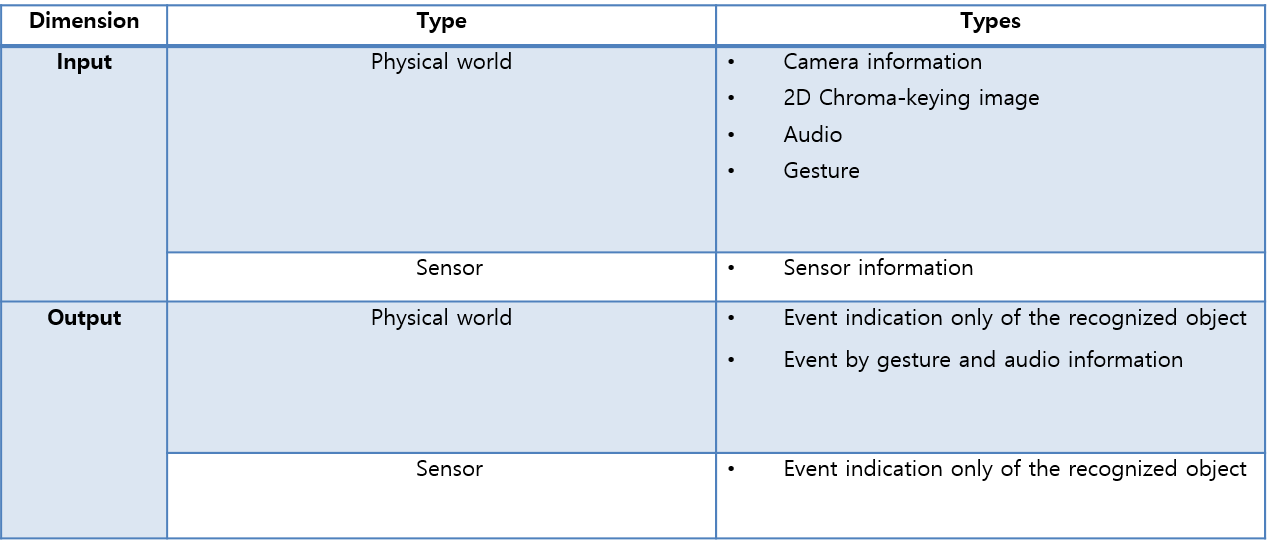
Input / Output of LAE Recognizer
Node for LAE Recognizer
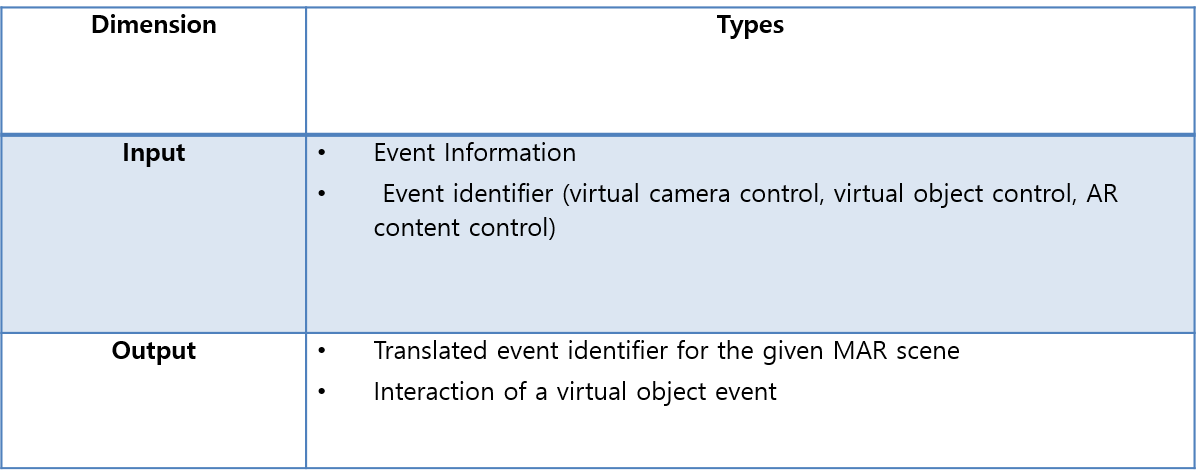
Input / Output of LAE Event Mapper
Node for LAE Event Mapper
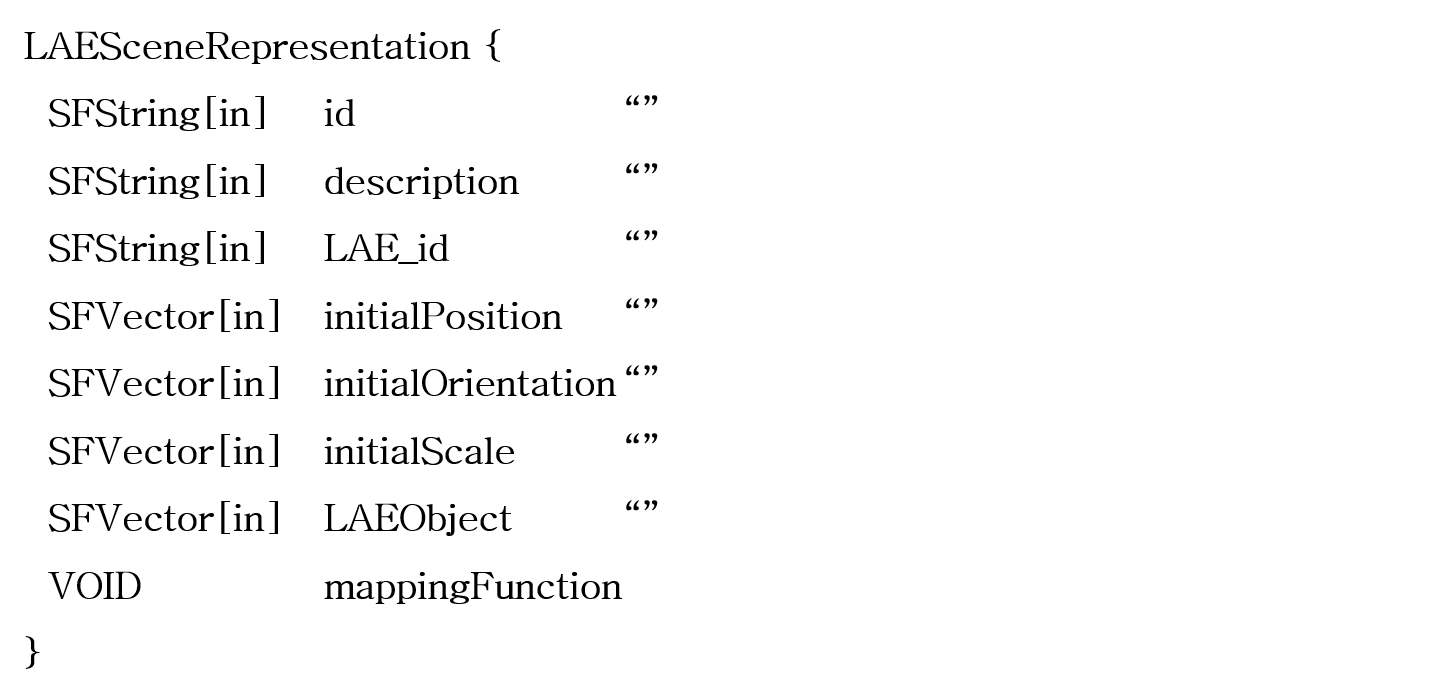
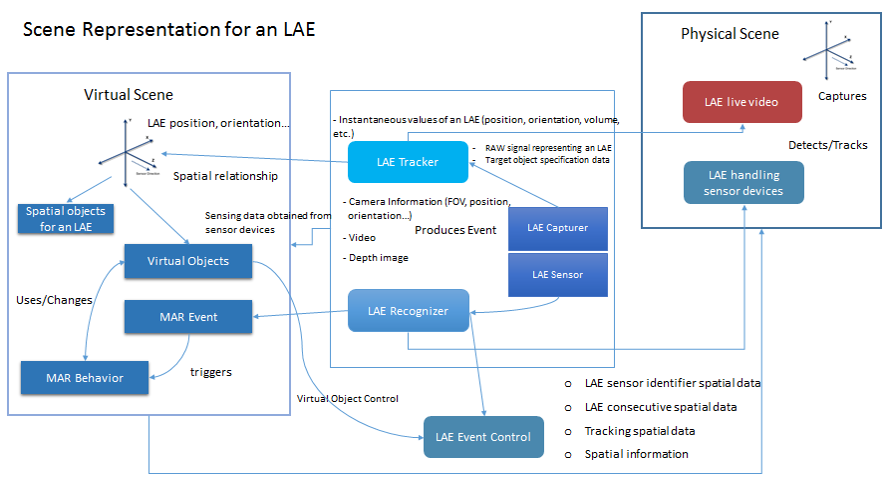
Scene Representation for an LAE
- Scene Representation for an LAE refers to a scene that represents a virtual scene and placeholders. It serves as the implementation structure that combines the physical world scene/objects and the virtual scene/objects.
- It is the observable spatiotemporal organization of physical and virtual objects that have been tracked and recognized by the LAE tracker and LAE recognizer functions.
Scene description for spatial mapping of an LAE

Scene description for event mapping of an LAE

LAE SceneRepresentation node